
 zhuhongbin
a721edc3bf
Signed-off-by: zhuhongbin <kptzhu@163.com>221012
zhuhongbin
a721edc3bf
Signed-off-by: zhuhongbin <kptzhu@163.com>221012
|
3 tahun lalu | |
|---|---|---|
| .. | ||
| figures | 3 tahun lalu | |
| inc | 3 tahun lalu | |
| src | 3 tahun lalu | |
| LICENSE | 3 tahun lalu | |
| readme.md | 3 tahun lalu | |
readme.md
# 系统看守
1.简介
系统看守(syswatch)组件 主要功能是保障实时操作系统正常运行,防止系统死机以及各种异常引起的线程阻塞,保障整个系统长期正常运行。系统看守具备以下几种行为模式:
1.系统崩溃或硬件异常导致系统失去调度时,执行 系统复位 恢复系统正常运行。
2.当有异常导致某些线程长时间阻塞时,可根据用户的配置实施 系统复位 / 杀掉阻塞线程 / 重启阻塞线程 的方式恢复系统正常运行。
1.1工作原理简述
系统看守(syswatch)组件 使用实时操作系统中允许的最高优先级作为看守线程的优先级,保障看守线程不会被阻塞,同时看守线程由看门狗提供看护,保障看守线程正常运行;系统看守通过 线程调度回调接口 监测线程的调度情况,当检测到有线程发生异常阻塞时,开始检测和确认具体哪个线程发生了异常阻塞,最后根据异常解决模式执行 系统复位 / 杀掉阻塞线程 / 重启阻塞线程 清除异常,使系统恢复正常运行。
1.2目录结构
syswatch 软件包目录结构如下所示:
syswatch
├───inc // 头文件目录
│ | syswatch.h // API 接口头文件
│ └───syswatch_config.h // 参数配置头文件
├───src // 源码目录
│ | syswatch.c // 主功能模块
│ └───syswatch_test.c // 功能测试模块
├───figures // 文档使用图片
│ LICENSE // 软件包许可证
│ README.md // 软件包使用说明
└───SConscript // RT-Thread 默认的构建脚本
1.3许可证
syswatch package 遵循 LGPLv2.1 许可,详见 LICENSE 文件。
1.4依赖
- RT_Thread 4.0
- RT_Thread watchdog device
- RT_Thread enable system hook
2.使用
2.1获取组件
方式1: 1.下载syswatch软件包,并将软件包
syswatch文件夹复制到工程原码目录下 2.将软件包中syswatch.c和syswatch_test.c加入项目工程中 3.将软件包中syswatch_config.h中RT_USING_SYSWATCH和SYSWATCH_USING_TEST两个宏的注释去掉;并根据需要修改各项配置参数方式2: 通过 Env配置工具 或 RT-Thread studio 开启软件包,根据需要配置各项参数;配置路径为 RT-Thread online packages -> system packages -> syswatch
2.2配置参数说明
| 参数宏 | 说明 |
|---|---|
SYSWATCH_EXCEPT_RESOLVE_MODE |
异常解决模式,可配置值0~2,默认值 2,0--复位系统,1--杀掉异常线程,2--重启异常线程 |
SYSWATCH_EXCEPT_TIMEOUT |
判定存在线程异常的超时时间,单位:秒,默认值 60 |
SYSWATCH_EXCEPT_CONFIRM_TMO |
确认异常线程的超时时间,单位:秒,默认值 15 |
SYSWATCH_EXCEPT_RESUME_DLY |
重启异常线程的延时时间,单位:秒,默认值 15 |
SYSWATCH_THREAD_PRIO |
系统看守线程的优先级,默认值 0 |
SYSWATCH_THREAD_STK_SIZE |
系统看守线程的堆栈尺寸,默认值 512 |
SYSWATCH_THREAD_NAME |
系统看守线程的名称,默认值 syswatch |
SYSWATCH_WDT_NAME |
使用看门狗设备的名称,默认值 wdt |
SYSWATCH_WDT_TIMEOUT |
使用看门设备的超时时间,单位:秒,默认值 5 |
3.注意事项
- syswatch 依赖于看门狗设备而工作,使用本组件时请确认已注册了看门狗设备。
- syswatch 全权管理看门狗,请不要在其它线程中使用和操作看门狗。
- syswatch 提供了3种异常解决模式,请根据实际需要配置适合的工作模式。
syswatch_set_event_hook提供用户安装事件回调函数,以便针对重要事件发生时进行一些必要处理,如系统复位前须对重要数据进行保存时,可设置回调函数完成相应处理,如不需要可不设置。
4.测试验证
组件安装后,为了验证其功能是否正常,组件提供了测试例程,可通过shell命令syswatch_test创建异常模拟线程。
syswatch_test命令参数有2个,第1个是创建线程的优先级,第2个是发生异常阻塞的延时时间。
如执行命令syswatch_test 20 30后,会创建一个优先级为20的线程,在线程开始运行30秒后,线程进入异常阻塞状态。
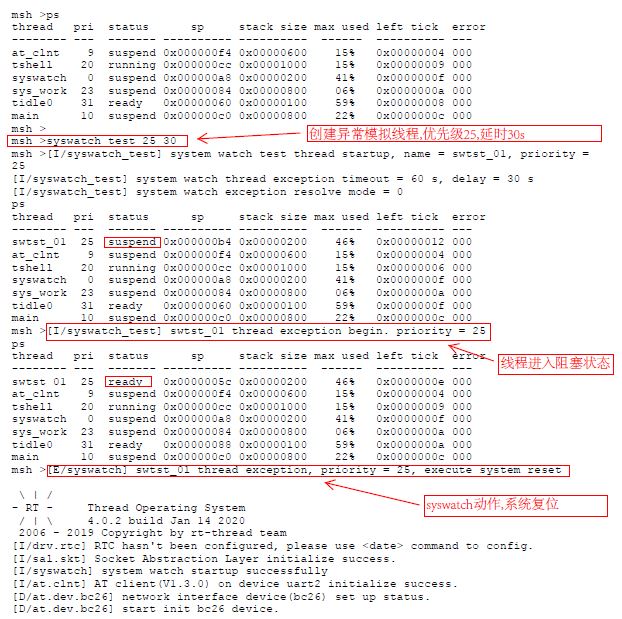
4.1模式0测试示例
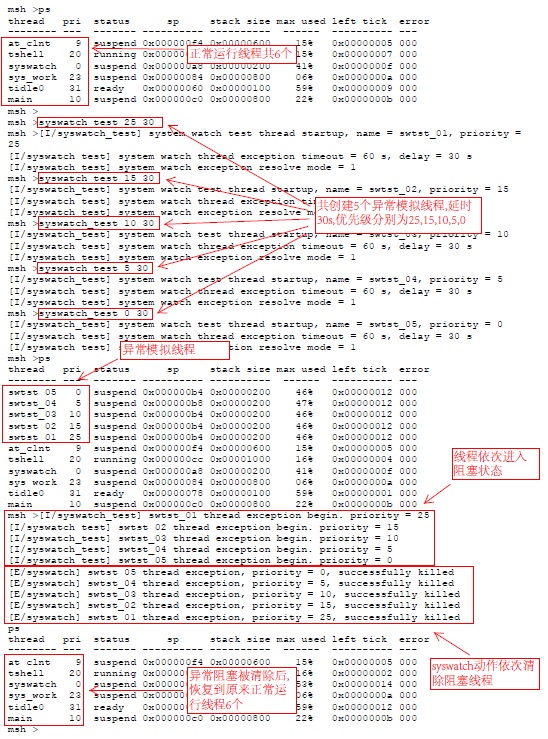
4.2模式1测试示例
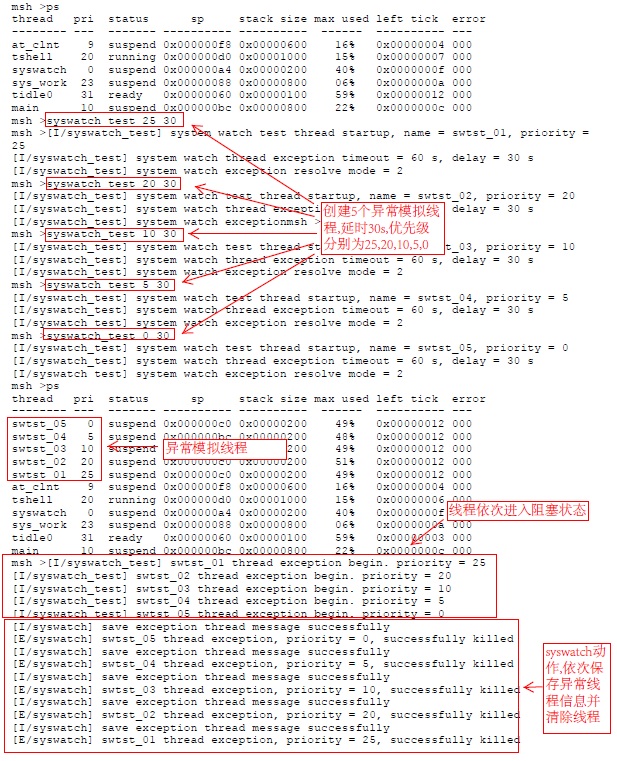
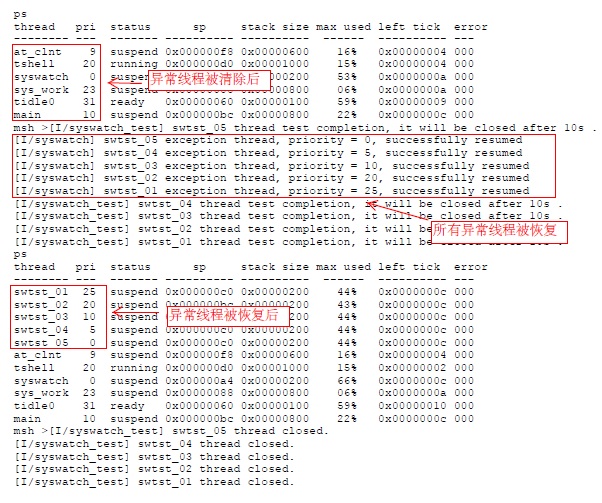
4.3模式2测试示例
5. 联系方式
- 维护:qiyongzhong
- 主页:https://github.com/qiyongzhong0/rt-thread-syswatch